![[Translate to English:]](/storages/zentraler_bilderpool/_processed_/2/6/csm_Altes_Maschinenbau-Gebaeude_60ecc93ec7.jpg "[Translate to English:]")
Challenger
Development of a virtual and robot-assisted therapy station
Problem
In the rehabilitation process, the therapy intensity of ergo- and physiotherapeutic measures is a very decisive factor for the success of the therapy. The therapy units should be as long as possible and take place as often as possible, adapted to the needs and the respective performance capacity of the patient. Since an increasing need for rehabilitative care is to be expected due to demographic development alone, but the available resources are already insufficient, the use of technical systems, which are primarily intended to relieve the time burden on therapeutic staff, is an extremely desirable measure for improving the therapeutic offer. Especially in the case of restrictions in the mobility of the upper extremities and in the area of neurologically caused restrictions of the visual field, application scenarios are conceivable in which the patient trains under the supervision of the therapist, but still autonomously in the timing and intensity of the exercises at a sensor-, virtual- and robot-supported therapy place. The advantages of such a therapy station consist in a possible fine gradation of the difficulty of an exercise, the arbitrary repeatability of exercises, the immediate visibility of success or failure through feedback, the continuous and automatic documentation of the course of therapy and finally the increase of the patient's motivation with the appropriate design of the human-machine interaction processes through attractive and user-friendly interfaces.
Objective
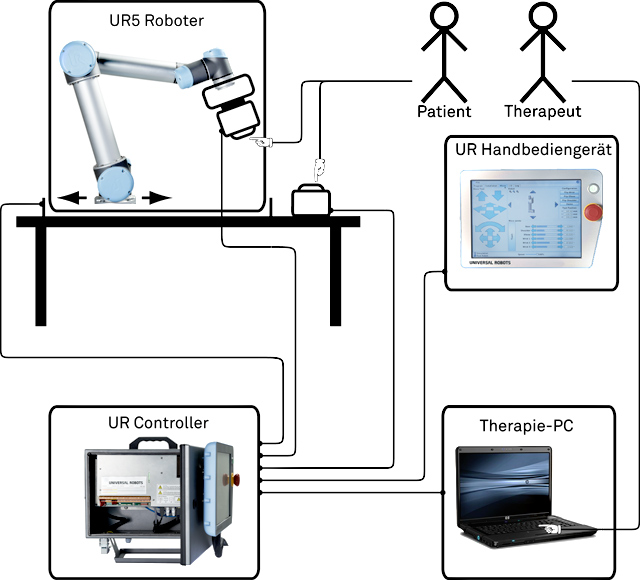
The project goal is to develop a sensor-, virtual- and robot-supported therapy workstation for the treatment of movement disorders of the upper extremities. In addition, a subsystem of the workstation should also be able to be used for the therapy of visual field defects. The essential components of the workstation are:
- Sensory detection of the patient's arm movements, as well as measurement of muscle activity.
- Virtual reality environment for movement specification and superimposition of the actual movement as feedback
- Robotics for the provision of static and dynamic grasping targets for therapy implementation
In addition, personal and therapy-related data should be recorded continuously in order to document and evaluate the course of therapy. In addition, the data can be used to make necessary adjustments to the therapy exercises.
The Institute for Production Systems is involved in the development of the HMI and the control technology components. Here, real activities are to be simulated close to reality from the patient's point of view. In essence, this means replicating the physical properties of the gripping objects in the control system and ensuring smooth integration into the VR environment. In addition, the safety of the grip could be sensed in order to also address fine motor skills. Even complex processes could be trained realistically in this way and progress in the course of therapy could be transferred more directly to everyday life. In order to keep the barriers to entry low, the use of components from the field of consumer electronics instead of industrial products is being sought.
Procedure
The desired research results are developed within the framework of 12 work packages. These successively implement the individual components of the therapy workplace, whose architecture is shown in the figure.
Research- and Development Partner
ROBOT-TECHNOLOGY GmbH
CONTEMPLAS GmbH
Clinic for Physical Medicine and Rehabilitation of the University of Munich
Funding Reference
The ZIM project Challenger is funded by the Federal Ministry of Economics and Technology via the AiF as part of the programme "Central Innovation Programme for Medium-sized Enterprises" on the basis of a resolution of the German Bundestag.