
Challenger
Entwicklung eines virtuell- und robotergestützten Therapieplatzes
Problemstellung
Im Rehabilitationsprozess stellt die Therapieintensität ergo- und physiotherapeutischer Maßnahmen einen ganz entscheidenden Faktor für den Therapieerfolg dar. Die Therapieeinheiten sollten, angepasst an die Bedürfnisse und das jeweilige Leistungsvermögen des Patienten, so lang wie möglich sein und so oft wie möglich stattfinden. Da allein aufgrund der demographischen Entwicklung ein zunehmender Bedarf an rehabilitativer Versorgung zu erwarten ist, die verfügbaren Ressourcen aber schon jetzt nicht ausreichen, stellt der Einsatz von technischen Systemen, die vor allem die zeitliche Entlastung des therapeutischen Personals zum Zweck haben, eine äußert wünschenswerte Maßnahme zur Verbesserung des therapeutischen Angebots dar. Insbesondere bei Einschränkungen der Beweglichkeit der oberen Extremitäten und im Bereich neurologisch bedingter Einschränkungen des Gesichtsfeldes sind Anwendungsszenarien denkbar, in denen der Patient zwar unter Supervision des Therapeuten, aber doch autonom im Zeitablauf und der Intensität der Übungen an einem sensor-, virtuell- und robotergestützten Therapieplatz trainiert. Die Vorteile eines solchen Therapieplatzes bestehen in einer möglichen Feinabstufung der Schwierigkeitsgrade einer Übung, der beliebigen Wiederholbarkeit von Übungen, der unmittelbaren Sichtbarkeit von Erfolg oder Misserfolg durch Feedback, der kontinuierlichen und automatischen Dokumentation des Therapieverlaufs und schließlich der Erhöhung der Motivation des Patienten bei entsprechender Gestaltung der Mensch-Maschine-Interaktionsprozesse durch attraktive und benutzerfreundliche Schnittstellen.
Zielsetzung
Das Projektziel ist die Entwicklung eines sensor-, virtuell- und robotergestützten Therapieplatzes zur Behandlung von Bewegungsstörungen der oberen Extremitäten. Zusätzlich soll ein Teilsystem des Arbeitsplatzes auch zur Therapie von Gesichtsfeldausfällen genutzt werden können. Die wesentlichen Komponenten des Arbeitsplatzes sind:
- Sensorische Erfassung der Armbewegungen des Patienten, sowie die Messung der Muskelaktivität
- Virtual Reality Umgebung zur Bewegungsvorgabe und Überlagerung der tatsächlichen Bewegung als Feedback
- Robotik zur Bereitstellung von statischen und dynamischen Greifzielen zur Therapiedurchführung
Darüber hinaus sollen fortlaufen personen- und therapiebezogene Daten aufgezeichnet werden, um den Therapieverlauf zu dokumentieren und bewerten zu können. Außerdem können anhand der Daten notwendige Anpassungen der Therapieübungen erfolgen.
Das Institut für Produktionssysteme befasst sich mit der Entwicklung der HMI sowie der steuerungstechnischen Komponenten. Hierbei sollen aus Patientensicht reale Tätigkeiten Wirklichkeitsnah nachgebildet werden. Im Kern bedeutet dies, die physikalischen Eigenschaften der Greifobjekte in der Steuerung nachzubilden und eine fließende Einbindung in die VR-Umgebung sicherzustellen. Zusätzlich könnte die Griffsicherheit sensorisch erfasst werden, um auch die Feinmotorik anzusprechen. Selbst komplexe Abläufe könnten auf diese Weise realitätsnah trainiert werden und Fortschritte im Therapieverlauf ließen sich direkter auf den Alltag übertragen. Um die Einstiegshürden gering zu halten, wird die Verwendung von Komponenten aus dem Bereich Unterhaltungselektronik anstatt industrieller Produkte angestrebt.
Vorgehensweise
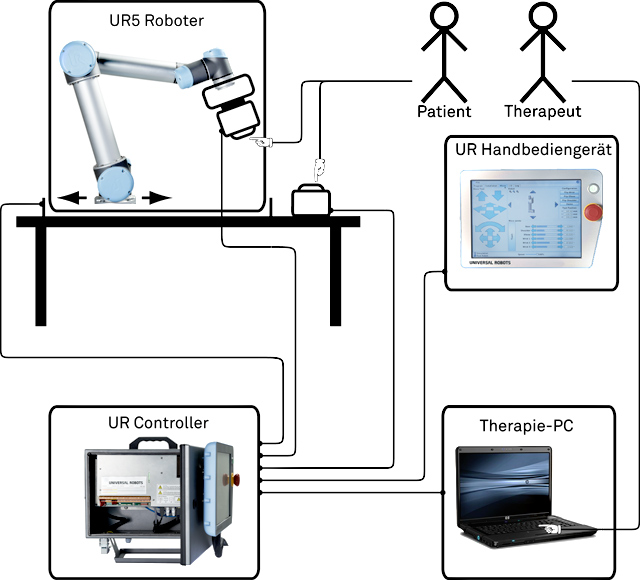
Die angestrebten Forschungsergebnisse werden im Rahmen von 12 Arbeitspaketen erarbeitetet. Diese implementieren sukzessive die einzelnen Komponenten des Therapieplatzes, dessen Architektur in der Abbildung dargestellt ist.
Forschungs- und Entwicklungspartner
ROBOT-TECHNOLOGY GmbH
CONTEMPLAS GmbH
Klinik für Physikalische Medizin und Rehabilitation der Universität München (PMR)
Förderhinweis
Das ZIM-Vorhaben Challenger wird über die AiF im Rahmen des Programms „Zentrales Innovationsprogramm Mittelstand“ vom Bundesministerium für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages gefördert.