
LBR-Zelle
Aufgrund der zunehmenden Variantenvielfalt sowie des Fachkräftemangels, wächst das Interesse der Industrie an der Mensch-Roboter-Kollaboration (MRK) stetig. Damit einhergehend steigt der Bedarf an Ingenieuren und Produktionsmitarbeitern, die sowohl die Funktionsweise solcher Systeme verstehen als auch in der Lage sind, diese zu bedienen. Ein System, das den Anwender hinsichtlich dieser Anforderungen qualifizieren soll, ist der Leichtbauroter-Demonstrator des IPS, der im Rahmen des Forschungsprojekts CSC entwickelt wurde.
Hardware und Aufbau
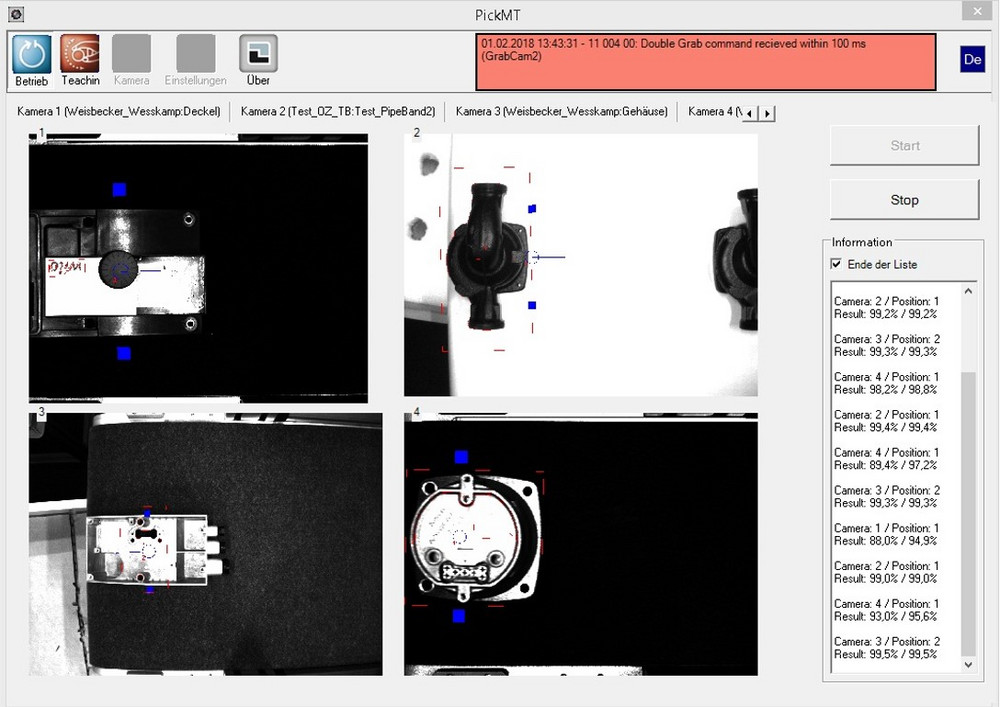
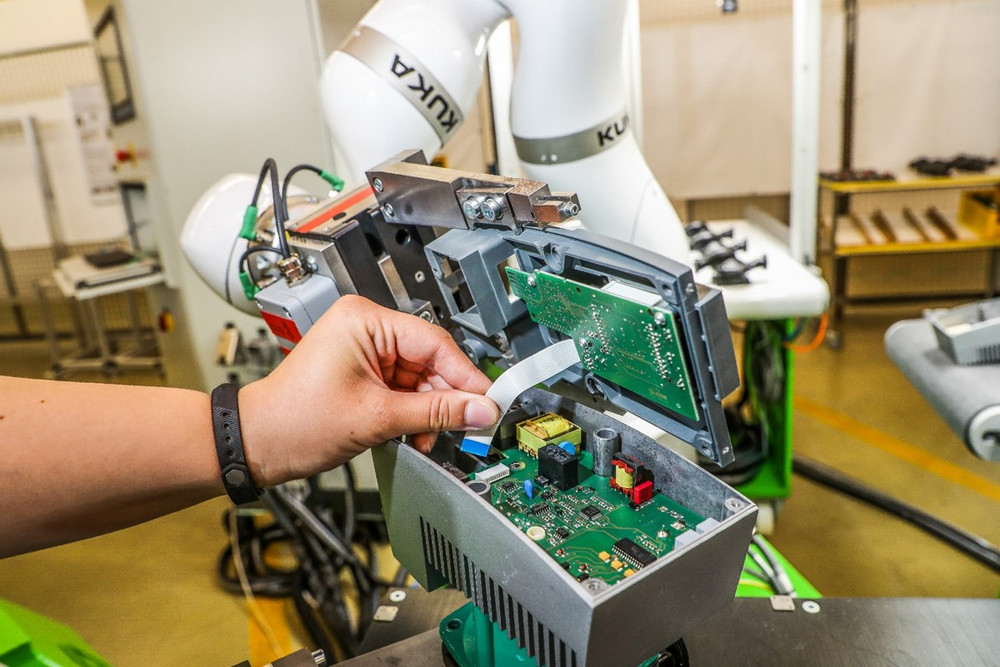
Kern des LBR-Demonstrators sind die Leichtbauroboter KUKA iiwa 7 und UR10, die ohne trennende Schutzeinrichtung mit dem Menschen kollaborieren können und so die Wiederholgenauigkeit der Roboter mit der Flexibilität des Menschen kombinieren. Während der UR10 im entwickelten Anwendungsszenario die Funktion eines flexiblen Werkstückträgers übernimmt, fungiert der KUKA iiwa 7 als kollaborativer Monteur. Die Materialbereitstellung erfolgt über vier Förderbänder an deren Anlieferpunkt ein Vision-System die Lage der Bauteile auf den Förderbändern erkennt und an den KUKA iiwa 7 kommuniziert. Spezielle Werkstückträger sind somit nicht erforderlich. Der Abtransport des montierten Erzeugnisses erfolgt über den UR10, der das fertige Produkt auf ein dafür vorgesehenes Abführband platziert. Zusätzlich zu den Leichtbaurobotern verfügt der LBR-Demonstrator über eine am IPS entwickelte IoT-Architektur, die die technische Anlagendokumentation nach Umbauten automatisch aktualisiert.


Anwendungsszenarien in Forschung und Lehre
Neben der Forschung und zum Training wird die LBR-Zelle, vor allem zur Demonstration der Einsatzmöglichkeiten von MRK-Systemen, anhand eines realen Produktionsprozesses für Unternehmen eingesetzt. Die Forschungsfelder erstrecken sich dabei von der eigentlichen Mensch-Roboter-Kollaboration über die wandlungsfähige Montages bis hin zum digitalen Zwilling. Die Forschung im Bereich des digitalen Zwillings beinhaltet die aktuelle Dokumentation der Anlage, welche für eine wandlungsfähige MRK-Anlage unerlässlich ist, da jede Änderung eine neue Risikobeurteilung erfordert. Dabei werden die einzelnen Module der Anlage in der Software digital abgebildet und mit den realen Komponenten verbunden. Auf diese Weise wird es möglich, Veränderungen an der realen Anlage in Echtzeit in das virtuelle Abbild zurückzuspielen. Die Erfassung der dazu notwendigen Prozessdaten wurde über ein Retrofitting der Anlage mit Sensoren durchgeführt.

