
Abgeschlossene Forschungsprojekte
Folgend finden Sie eine Übersicht der bereits abgeschlossenen Projekte des IPS.

Vernetzte und integrierte Anwendung industrieller Datenanalyse für die wertschaffende, kompetenzorientierte Kollaboration in dynamischen Wertschöpfungsnetzwerken
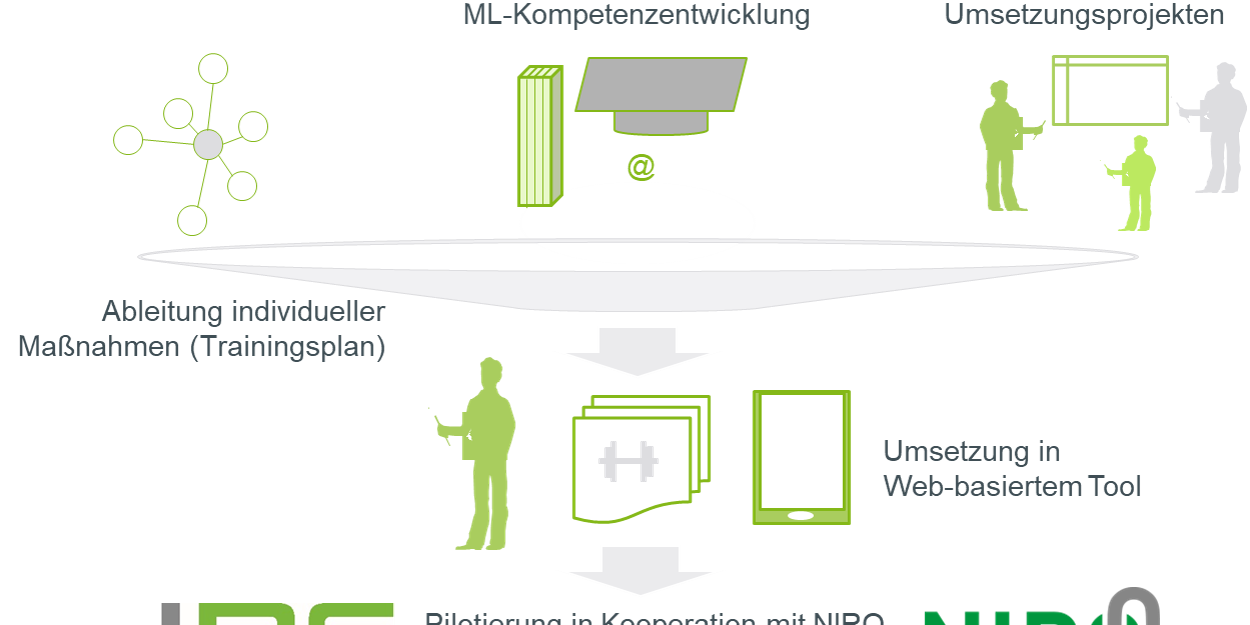
Konzept zum Aufbau von Kompetenzen des Maschinellen Lernens für Anlagenhersteller und produzierende KMU
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
SimUltane Produkt- und Prozessentwicklung eines automatisierungsgerechten Ladestation-Outlet-Moduls
Prädiktion dynamischer Engpässe in gerichteten Materialflusssystemen mittels maschineller Lernverfahren
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
Autonome Qualitätsregelung unter Anwendung maschineller Lernverfahren
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
Systematische Nutzung von Exoskeletten in Produktion und Logistik

System zur adaptiven photonischen Oberflächentestung mit lernfähiger Bildauswertung in Kombination mit einem Reinigungssystem

Entwicklung eines neuartigen selbstlernenden Greifarmsystems durch Adaption von Reinforcement Learning Algorithmen zur Ergänzung bestehender Leichtbauroboter zur flexiblen Bestückung von Leiterplatten mit der Through Hole Technology (THT)
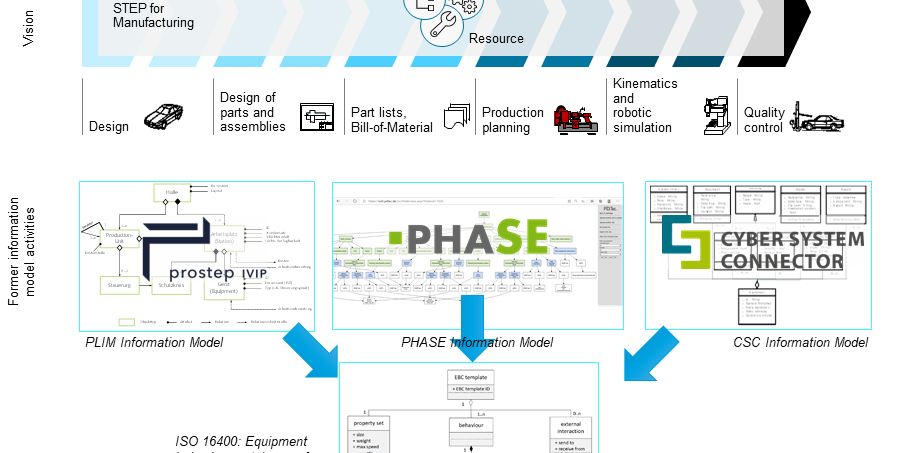
Equipment behaviour catalogues for virtual production systems
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
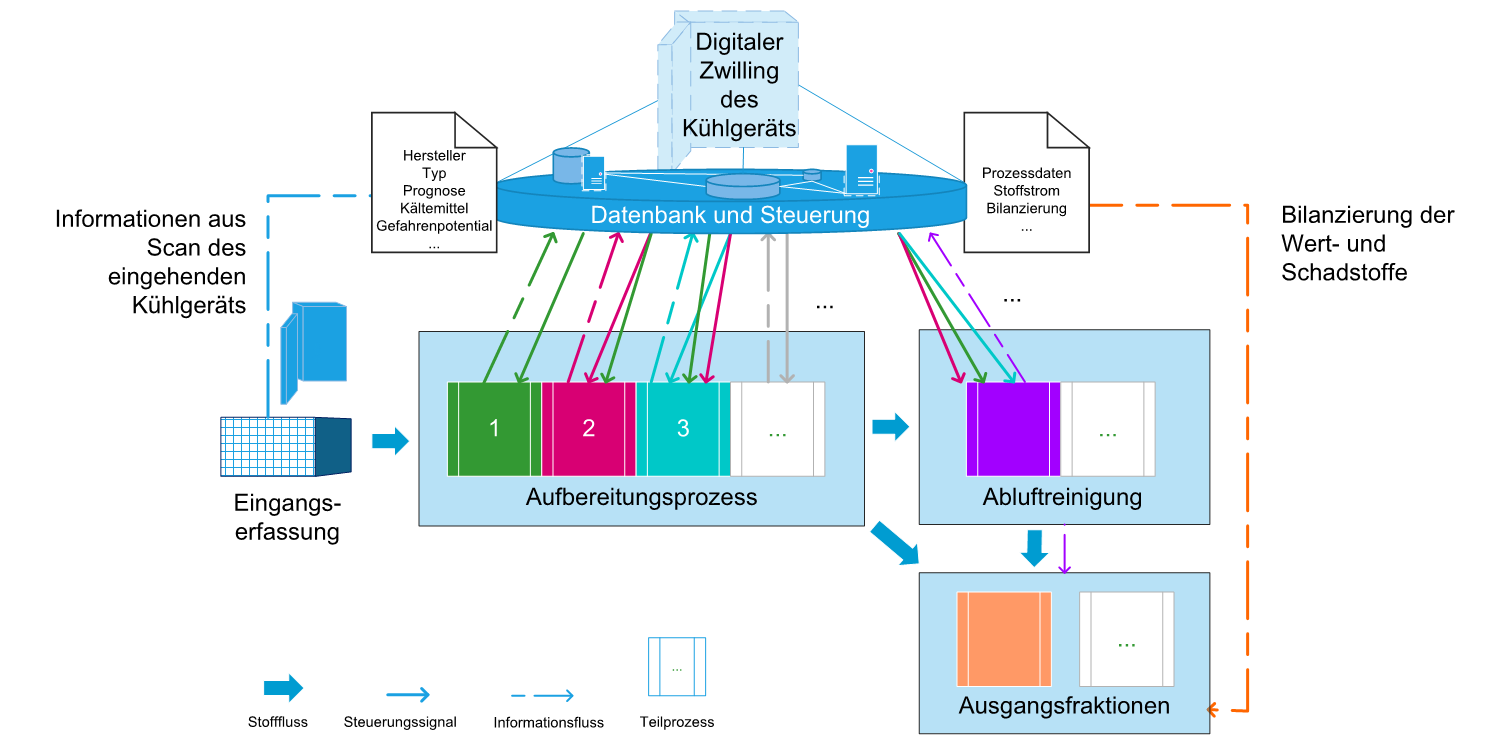
Nutzung digitaler Abbilder zur effizienten Steuerung von Aufbereitungsprozessen der Kreislaufwirtschaft am Beispiel von Kühlgeräterecyclinganlagen
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)

Verein bestehend aus Industrie, Forschung, Kohlenstoffsenken-Betreibern und Software-Betreibern, welcher ein Ökosystem schafft um die aktuellen und zukünftigen Herausforderungen der produktbezogenen Dekarbonisierung zu begegnen.
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
Qualitätslenkung in der Additiven Verarbeitung von Kupferwerkstoffen durch Prädiktion von Werkstoff- und Bauteileigenschaften mithilfe Maschinellen Lernens
Prozessketten-übergreifende Detektion von Material- und Prozessanomalien bei Imbalanced Data für technische Kunststoffbaugruppen
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)

2nd Machine Learning and IoT Summer School in Cyber-Physical Brewing Lab

Prädiktive Absatz- und Bedarfsplanung in der kundenorientierten Auftragsfertigung mittels Maschineller Lernverfahren
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)

Prognosebasierte Kompetenzbewertung
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
KI-Assistenzsystem zur Plausibilisierung, Korrektur und Erstellung von Fertigungsplänen
Humanzentrierte Ausführungsanalyse von manuellen Bewegungsabläufen mittels Motion Capturing und Artificial Intelligence
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
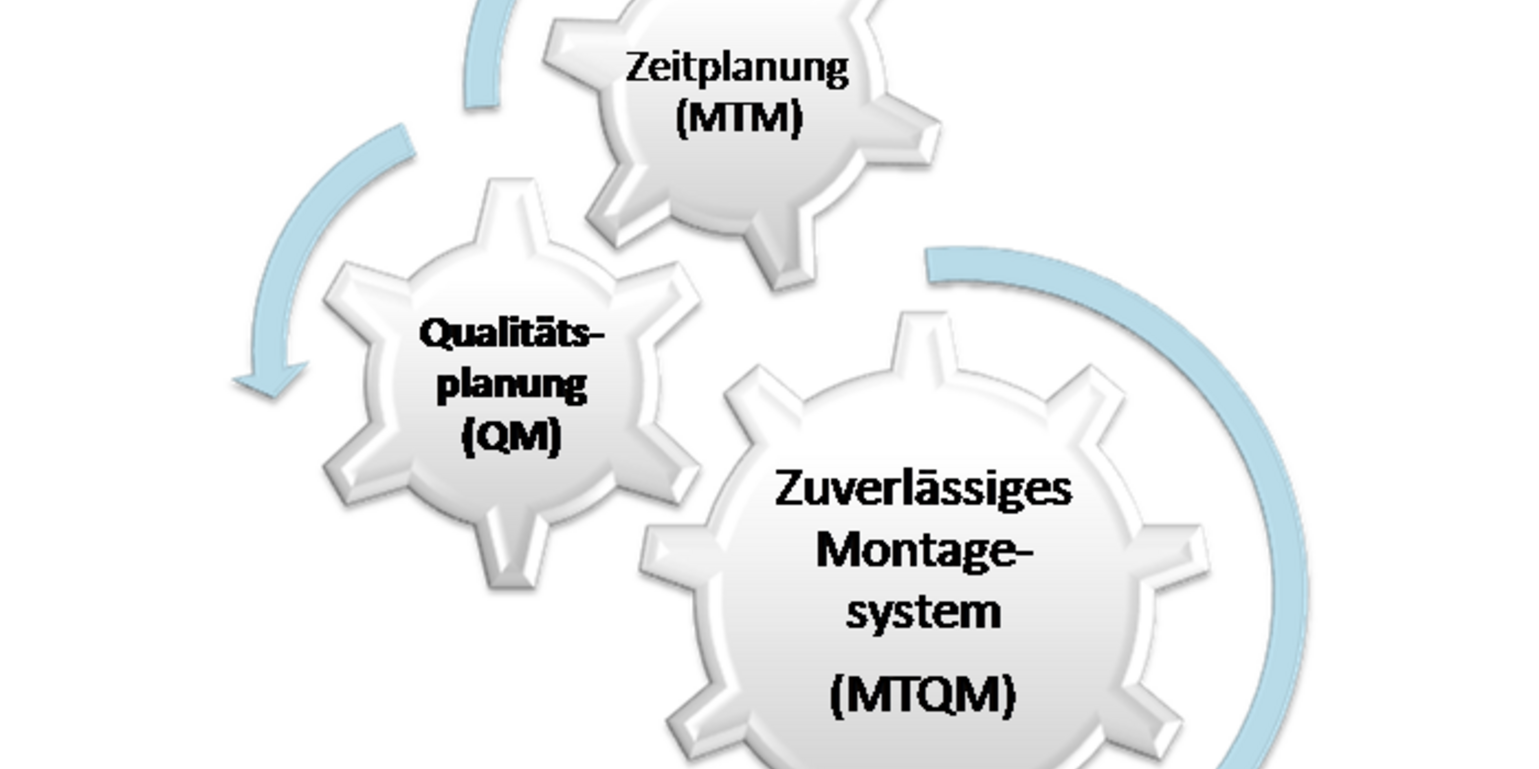
Simplifizierung des MTQM-Verfahrens zur niedrigschwelligen Anwendbarkeit in KMU
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
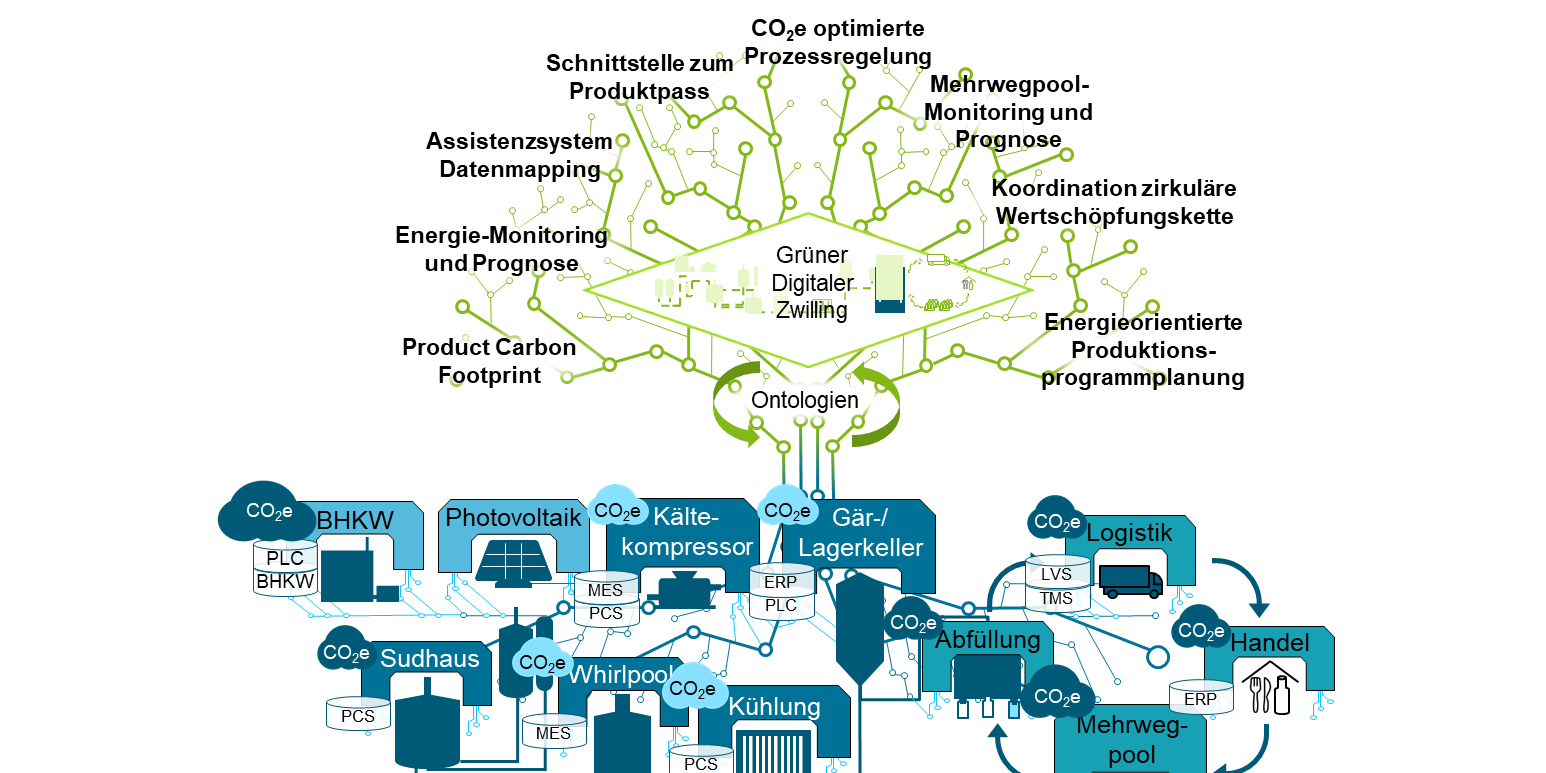
Grüner Digitaler Zwilling als Basis der nachhaltigen Transformation der Getränke- und Brauwirtschaft
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
Akzeptanz und Wirkung von Exoskeletten in der Bauindustrie
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)
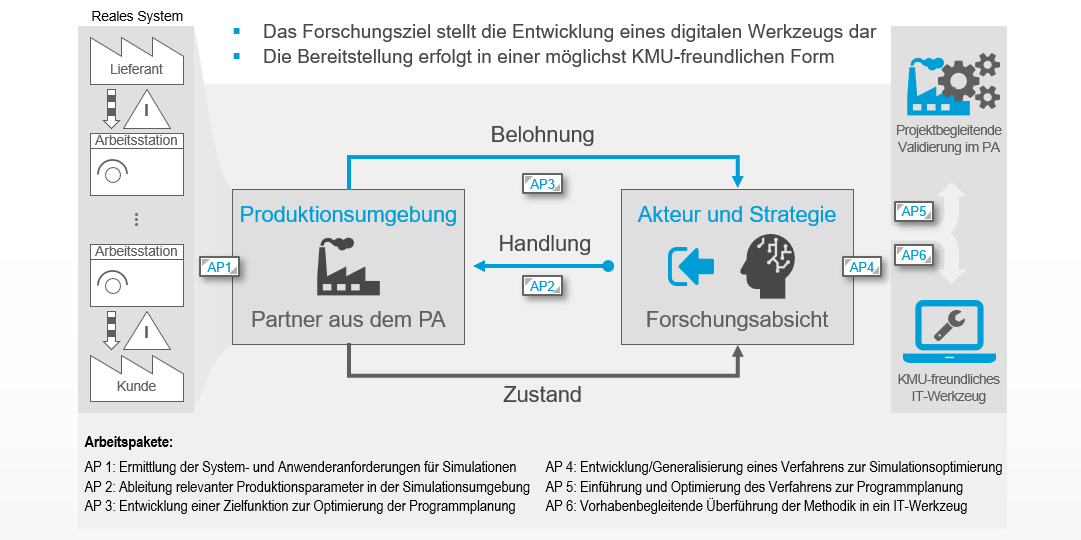
Operative Produktionsprogrammplanung durch selbstoptimierende Materialflusssimulation mittels Reinforcement Learning
(Projektbearbeitung erfolgt durch RIF e.V., Abteilung Produktionssysteme)

- ADiFa
Ziel des Verbundprojekts ist die Weiterentwicklung und Standardisierung eines Referenzplanungsprozesses der digitalen Produktentstehung. Dieser soll in einem ersten Schritt als DIN-Entwurf manifestiert werden und weiter in einem internationalen ISO-Standard münden. Durch diese Standardisierung soll eine höhere Verbindlichkeit für produzierende Unternehmen erreicht werden. -
AgileKMU
Ziel des Forschungsvorhabens ist die Entwicklung einer digitalen Plattform zur unternehmensübergreifenden Kooperation in der agilen Gestaltung von Produktionssystemen. Die Aufteilung der Planungsaufgaben in Sprint-Meetings wird über die bisherigen Grenzen erweitert, um diese kurzzyklischen und integrierten Methoden auch im verteilten Engineering zu ermöglichen. Die zu entwickelnde Plattform soll die Bereitstellung von Planungsdaten und -prozessen ermöglichen und ein digitales Workflowmanagement integrieren, welches zur Unterstützung der unternehmensinternen Ablauforganisation genutzt werden kann. Die agile Zusammenarbeit wird hierbei durch eine zielgerichtete Bereitstellung von Planungsdaten und ein flexibles Visualisierungskonzept unterstützt. - AGMASS
Das Ziel des Kooperationsprojektes besteht darin, aufbauend auf bestehenden Basistechnologien eine automatische „Greifzelle für die Massivumformung" zu entwickeln, im industriellen Umfeld zu erproben und für den Serieneinsatz in der Massivumformung zu optimieren. Die Teilziele liegen darin, die Technik "Griff in die Kiste" für den Bereich Massivumformung anwendungsreif und prozesssicher zu machen, die Möglichkeiten und Grenzen aus Sicht der Teilegeometrien und der Schüttungen transparent zu machen und die Anwendungspotentiale "nach dem Griff" auszuloten und technisch/wirtschaftlich zu bewerten. - AIM
Ziel des Forschungsvorhabens ist die Entwicklung einer neuen Komponente des betrieblichen Gesundheitsmanagements (BGM) für den dauerhaften Erhalt der Anpassungs- und Beschäftigungsfähigkeit von Mitarbeitern. Von wesentlicher Bedeutung ist hierbei die gezielte sensorische, kognitive Mitarbeiterunterstützung durch ein Arbeitsassistenzsystem an einem bereits gestalteten Arbeitsplatz. Zentraler Aspekt der neuen Komponente des BGM ist die Verknüpfung der ergonomischen und strukturellen Arbeitsgestaltung mit der Kompetenz- und Personalentwicklung. - AuGeEn
Innerhalb des Projektes soll eine Anlage für die automatisierte Erstellung von Schleifbandnestern (als Verpackungseinheit ineinander gesteckte Bänder) entwickelt werden, die vor allem den Flexibilitätsanforderungen hinsichtlich der unterschiedlichen Schleifbändern als auch den Produktivitätsanforderungen hinsichtlich wirtschaftlicher und technischer Kenngrößen Rechnung trägt. Dabei soll das an der Universität Dortmund entwickelte Prinzip des Nestens weiterentwickelt und zur Marktreife überführt werden. Dies erfordert neben einer konstruktiven Ausgestaltung und Optimierung des eigentlichen Nestprinzips zu einer modularen und flexiblen Anlage die Integration weiterer Funktionen wie dem Zwischenspeichern (Puffern) und der Qualitätskontrolle. - AutoEdge
Das Ziel dieses Projektes ist die Etablierung einer gezielten Kantenpräparation durch das Strahlspanverfahren zur flexiblen zerspanprozessspezifischen Abstimmung der Kantengestalt komplexer Zerspanwerkzeuge und die Integration dieses Prozesses in die industrielle Fertigungskette. - Challenger
Das Projektziel ist die Entwicklung eines sensor-, virtuell- und robotergestützten Therapieplatzes zur Behandlung von Bewegungsstörungen der oberen Extremitäten. - CLean
Das Forschungsprojekt „Wertstromübergreifende Auslegung von Bauteilreinigungskonzepten (CLean)“ startet im April 2016 mit dem Ziel der Konzeption einer ganzheitlichen Systematik zur Analyse sauberkeitskritischer Wertströme sowie zur Gestaltung und Bewertung der Integration und Organisation von Bauteilreinigungsanlagen. - Conexing
Das Ziel des Vorhabens ist, alle in den Gesamtprozess involvierten Experten interdisziplinär und unternehmensübergreifend von der Konzipierungsphase bis zur virtuellen Produktionsüberprüfung in einer gemeinsamen Arbeitsumgebung – der conexing-Lösung – zusammenzubringen. - Cyber System Connector
Ziel des Forschungsprojekts CSC ist es eine aktuelle technische Dokumentation durch ein virtuelles Abbild der Anlagen über den gesamten Produktentstehungsprozess zu gewährleisten. Der CyberSystemConnector (CSC) bildet dabei die Schnittstelle für jede eingebundene Systemkomponente einer Maschine und Anlage. Jede Änderung der Anlage und damit der technischen Dokumentation, wird in ein virtuelles Abbild der Anlage zurückgespielt. Somit existiert stets zur realen Anlage ein äquivalentes virtuelles Abbild der Anlage. - CSR
Das Ziel von „Change pro CSR“ ist die systematische und stufenweise Verankerung der Werte von CSR in die Unternehmensführung und -kultur kleiner und mittelständischer Unternehmen aus dem Bereich Metall-, Maschinenbau und Industrieelektronik des Netzwerks Industrie RuhrOst (NIRO). - DAPRO (Projekt des Kooperationspartners RIF e.V.)
Ziel des Forschungsprojekts DaPro ist die Entwicklung einer modularen Referenzarchitektur zur kollaborativen Datennutzung in der Getränkeindustrie zur Ermöglichung datengetriebener Prozessoptimierungen. Die enge Kooperation zwischen Anwendern, Maschinen- und Anlagenbauern ermöglicht die Entwicklung innovativer, datengetriebener Prozessoptimierungen und fördert die Digitalisierungsbestrebungen der Prozessindustrie. Im Fokus steht die Entwicklung eines Werkzeugkoffers an Data Mining-Modulen sowie einer IoT-Referenzarchitektur für die Getränkeindustrie. Parallel werden bei den Anwendungspartner exemplarische Use Cases definiert und umgesetzt. Diese praxisnahen Beispiele ermöglichen den Aufbau spezifischer Analysemodule und die Validierung erstellter Lösungsmuster. - EOP
Ziel des Forschungsvorhabens ist folglich die Unterstützung bei der Auswahl einer kostenoptimalen Strategie zur Nachserienproduktion bzw. Bevorratung von Ersatzteilen nach End of Production. Ansatzpunkt bildet hier die Integration von Ersatzteilbedarfen in die laufende Produktion, um die bestehende Produktionsumgebung und damit Synergieeffekte nutzen zu können. - ErgoKom
Entwicklung einer spezifizierten und aufwandsarmen Methodik zur Analyse, Bewertung und Visualisierung auftretender körperlicher Belastungen in Kommissioniersystemen unter Berücksichtigung anerkannter Arbeitsanalyseverfahren. - GPS für LDL
Angesichts der Zunahme des Leistungsspektrums von Logistikdienstleistern und der Verbreitung von GPS in produzierenden Unternehmen zahlreicher Branchen und Wertschöpfungsstufen, ist es vorrangiges Ziel des Forschungsvorhabens, die Auswirkungen dieser Entwicklungen intensiv zu durchdringen, um darauf aufbauend ein angepasstes GPS-Referenzmodell für Logistikunternehmen zu entwickeln. - Hands on IE!
Die akademische IE-Ausbildung am Lehrstuhl für Arbeits- und Produktionssysteme verfolgt das Ziel, den Studierenden die theoretischen Grundlagen der Arbeitssystemgestaltung zu vermitteln und diese im industrienahen Kontext anwendungsnah zu vertiefen. - HaptoBot
Im Rahmen des Projektes soll ein Standard-Industrieroboter mit einer echtzeitfähigen Kraftregelung und einem hochauflösenden Kraft-Momenten-Sensor ausgestattet werden. Der Roboter dient zur Ausführung der Prüfbewegungen am Schaltelement und gleichzeitig zur Erfassung der Bedienkräfte. - HoQaB
Hochgeschwindigkeits-Qualitätsprüfung für Blechaußenhautbauteile - InDaS
Industrial Data Science - Qualifizierungskonzept für Maschinelles Lernen in der industriellen Produktion - INDIVA
Individualisierte sozio-technische Arbeitsassistenz für die Produktion - Inforob
Modulares systemunabhängiges Schulungsmodell für die innovative Fortbildung in Roboteranwendungen für KMUs - Der Roboter als Erklärender seiner Arbeitsweise unterstützt das Personal von Anfang an in der Erlernung der Thematik durch die Vorstellung wichtiger Elemente der Roboterhandhabung und -programmierung. - InnoLern
Die Ziele des Projekts InnoLern können unternehmensbezogen und netzwerkbezogen differenziert werden. Auf der unternehmensbezogenen Ebene werden operative Mitarbeiter der beteiligten Unternehmen in modernen Methoden des Industrial Engineerings und des Projektmanagements bedarfsgerecht geschult. Auf der Netzwerk-Ebene werden die operativen Mitarbeiter systematisch vernetzt und so der Wissenstransfer zwischen den Unternehmen angeregt. - IRW
Ziel des Projektes IRW ist es, durch innovative Strategien den KMU neue Wege und Chancen aufzuzeigen, damit diese mit der Konkurrenz Schritt halten und dem globalen Wettbewerb positiv und selbstbewusst entgegentreten können. Hauptaufgabe des Lehrstuhls, welcher im Teilbereich Produktion tätig ist, ist die Unterstützung der KMU bei der Verbesserung ihrer Produktionsprozesse sowie eine langfristige Erhöhung von Marktanteilen durch den Einsatz neuer Organisationsformen in der Produktion zu erreichen. - KoMPI
Ziel des geplanten Forschungsprojektes ist es, eine neue Methode zur integrierten Planung und Realisierung von kollaborativen Arbeitsplatzsystemen in der Montage bei variablen Produktszenarien zu entwickeln. Dies soll sicherstellen, dass auch Unternehmen mit geringer Erfahrung und begrenzten Ressourcen befähigt werden, kollaborative Arbeitssysteme mit Erfolg einzuführen und auch bei stark schwankender Produkt- und Variantenvielfalt dauerhaft wirtschaftlich zu betreiben. - Lasercut
Bauteilunabhängige Aufnahme für das robotergestützte Laserschneiden - MANUSERV
Vom manuellen Prozess zum industriellen Serviceroboter; Planung, Entscheidungsunterstützung und Realisierung von Servicerobotik-Applikationen im industriellen Umfeld - MicroBatchFlow
Entwicklung von Fließkonzepten in der Montage variantenreicher Kleinserien unter Berücksichtigung technisch-wirtschaftlicher Aspekte - ModuLIT
Der Schwerpunkt des zu erstellenden Lehrgangs lag in der Gestaltung, Wartung und Programmierung von Automatisierungsanlagen, wobei insbesondere der Einsatz und die Programmierung von Industrierobotern sowie der notwendigen Peripherie Berücksichtigung findet. Die Lerninhalte sind dabei modular aufgebaut und voneinander weitgehend unabhängig zu bearbeiten. Der Lernprozess wird wegen der Komplexität des Themas durch eine realitätsnahe Simulation technischer Prozesse vereinfacht und unterstützt. - NED
Ziel des Forschungsvorhabens ist, eine netzwerkweite Exzellenz im Themenfeld des Demografischen Wandels in NRW zu erreichen. Aus den Ergebnissen des Vorhabens wird ein effizientes Exzellenz-Programm Demografie (EPD) für klein- und mittelständische Betriebe zur Bewältigung des Demografischen Wandels für KMU in NRW entwickelt. - Neue Formen von Industriearbeit
Empirische Basis des Projektes sind vertiefende Fallstudienanalysen in ausgewählten Produktions-standorten verschiedener Unternehmen. - NiVaK
Ziel des Forschungsvorhabens ist die Entwicklung einer systematischen Vorgehensweise zur Produktionsnivellierung in der variantenreichen Kleinserienfertigung, bei der die Rahmenbedingungen zur Umsetzung konventioneller Nivellierungskonzepte im Allgemeinen nicht gegeben sind. - OptiMilk
Es gilt, ein auf mathematischen Algorithmen basierendes Tool zu entwickeln, welches in Abhängigkeit von unternehmensindividuellen Einfluss-größen (z.B. Linientakt, Behältercharakteristika, Personalkapazität etc.) eine frequenzoptimierte Lieferzyklik ermittelt. - PHASE
Ziel des Forschungsprojekts ist die Entwicklung eines Ansatzes zur Einrichtung cyber-physischer Maschinen für die individualisierte Fertigung und Montage. Dazu werden im Rahmen der deutsch-koreanischen Kooperation "Manufacturing and Assembly as a Service (MAaS)" Forschungsergebnisse aus den Bereichen CPS und Cloud-Technologie zu einer internationalen IoT- Lösung integriert. Auf dieser Basis werden im Zusammenhang mit der personalisierten Lieferung, Vermietung und dem Betrieb von modularen Produktionssystemen neue Services für die Firma PDTec eingeführt. Für die Validierung werden Anwendungsszenarien auf koreanischer und deutscher Seite sowohl auf der Shopfloor-Ebene als auch in der Serviceschicht umgesetzt. - Powergrind
Ziel ist es, eine wesentliche Komponente des Werkzeuges, die Kontaktscheibe, grundlegend weiterzuentwickeln, mit dem Ziel die Abtragsleistung beim robotergestützten Bandschleifen deutlich zu steigern und damit die Wirtschaftlichkeit von Bandschleifprozessen zu verbessern. - Pro Mondi
Die Entwicklung einer Methode zur prospektiven Ermittlung von Montagearbeitsinhalten in einer frühen Phase des Produktentstehungsprozesses (PEP) . Der hierbei verfolgte Lösungsweg basiert auf einer Zusammenführung der Forschungsfelder der Produktdatentechnologie, der Digitalen Fabrik, des Data Mining und der Zeitwirtschaft, um domänenübergreifendes Planungswissen aus unterschiedlichen PEP-Phasen entlang der Produktentstehung verfügbar zu machen. - QU4LITY
Der Forschungsschwerpunkt des IPS ist die Entwicklung interoperabler digitaler Infrastrukturen für das ZDM durch die Erforschung industrieller Anwendungen der Datenanalyse. Wesentlicher Betrachtungsaspekt ist die Senkung der Fehlerkosten der automatischen Prozesssteuerung, indem die resultierende Produktqualität bereits während des Produktionsprozesses zuverlässig antizipiert wird. Auf Basis der antizipierten Produktqualität sollen Handlungsmaßnahmen für den nachfolgenden Produktionsprozess abgeleitet werden, sodass die Testeffizienz im gesamten Wertstrom erhöht wird. Letztere Zielstellung erfordert zur Gewährleistung einer detaillierten und zugleich digitalen Dokumentation die Entwicklung und Integration virtueller Sensoren in die Produktionsprozesse. - ReiMaFlu
Reinheitsgerechte Materialflusssysteme - Entwicklung eines Leitfadens zur reinheitsgerechten Gestaltung von Materialflüssen entlang des Wertstroms - ReProDiPro
Ziel des Verbundprojekts ist die Weiterentwicklung und Standardisierung eines Referenzplanungsprozesses der digitalen Produktentstehung. Dieser soll in einem ersten Schritt als DIN-Entwurf manifestiert werden und weiter in einem internationalen ISO-Standard münden. Durch diese Standardisierung soll eine höhere Verbindlichkeit für produzierende Unternehmen erreicht werden. - ReProInPlan
Referenzprozess zur durchgängigen Produktionsplanung – Vorbereitung der Standardisierung von Informationsflüssen und Planungskennzahlen - Roboforming
Das Institut für Roboterforschung der Technischen Universität Dortmund (IRF) liefert die Grundlagen zur informationstechnischen Generierung der Roboterprogramme auf der Basis von CAD-Daten. Neben den beiden Forschungseinrichtungen übernimmt der Industrieverband Blechumformung e.V. (IBU) mit Hilfe seines Kompetenznetzwerkes neben dem Wissenstransfer zum Nutzen von Verbundprojektpartner und Verbandsmitgliedern auch die Verbreitung der Ergebnisse. - Roprof
Die Schlüsselkomponenten der Entwicklung sind ein neuer, exakt den Anforderungen der Stahlbauunternehmen entsprechender mechanischer Aufbau des Robotersystems, eine automatische Roboterprogrammierung zum "Erlernen" neuer Schweißaufgaben in Sekundenschnelle und eine Sensorik, die dem Roboter das Erkennen und Kompensieren der im Stahlbau üblichen, großen Bauteilungenauigkeiten sicher ermöglicht. - rorarob
Schweißaufgabenassistenz für Rohr- und Rahmen-konstruktionen durch ein Robotersystem“ Entwicklung eines industriell einsetzbares System, bei dem die Interaktion von Mensch und Roboter im Mittelpunkt steht. - SafeGrip
Anhand einer vorher definierten Prozesssicherheit wird eine modulare, d. h. aus untereinander kombinierbaren Komponenten zusammengesetzte Systemauswahl zunächst für eine Anwendung im pharmazeutischen Laborbetrieb entwickelt. - SFB 696
In zwölf Teilprojekten, von denen eines an der Unversität Wuppertal durchgeführt wird, geht es darum, die heutigen und zukünftigen Anforderungen der Anwender, darunter auch den Produkt begleitenden Service, stärker in den Mittelpunkt der Produktentwicklung intralogistischer Systeme zu rücken. Vision ist es, die methodische und technische Basis zu schaffen für flexible, auf Veränderungen automatisch reagierende, sich selbst kontrollierende und reparierende zuverlässige Intralogistiksysteme. - SFB 708 - Teilprojekt A4
Das Ziel des Teilprojektes ist die Weiterentwicklung des robotergestützten thermischen Spritzens auf Basis einer effizienten Robotersimulation. Hierzu soll ein verallgemeinertes Modell für die Anwendung auf unterschiedliche Roboter und auch wechselnde Werkzeuge entwickelt werden, das insbesondere auch die dynamischen Effekte berücksichtigt und durch eine "schnelle Simulation" zur Optimierung des Gesamtprozesses beiträgt. - SFB 708 - Teilprojekt A6
Das Ziel des Teilprojekts A6 ist die Entwicklung und Führung von robotergestützten, kraftgeregelten Tuschierprozessen zur Optimierung der Geometrie und der Ober-flächeneigenschaften von hartstoffbeschichteten Umformwerkzeugen in der Produkti-onspresse. Teilprojekt A6 fokussiert sich auf die Entwicklung einer geeigneten Bahnplanung, die Adaption und Einbindung eines empirischen Modells für die Planung des Abtragsprozesses, die Entwicklung einer In-Prozess-Kontrolle zur Regelung des Tuschierprozesses sowie die Integration in ein Gesamtsystem. - SFB 876 - Teilprojekt B3
Das Ziel einer effizienten Null-Fehler-Produktion erfordert die Entwicklung ressourcenschonender Verfahren zur echtzeitfähigen Überwachung von Produktionsprozessen und Prädiktion qualitätsrelevanter Merkmale. Durch das Lernen aus Sensordaten können Echtzeitprädiktionen über die Produktqualität getroffen werden, die verwendet werden, um gezielt in den Produktionsprozess einzugreifen und auf diese Weise die Qualität zu steigern. Während das Projekt darauf fokussiert ist, Lücken in der wissenschaftlichen Forschung zu schließen, soll eine Übertragbarkeit der Ergebnisse auf reale Industrieanwendungen nicht vernachlässigt werden. Um diesen Transfer zu gewährleisten, müssen die entwickelten Verfahren auf realen Daten validiert und bewertet werden, die aus realen Anwendungsfällen stammen und mit entsprechenden Einschränkungen verbunden sind. - SkalKomm
Speziell für die Kommissionierung in konventionellen Kommissioniersystemen in KMU soll im Rahmen dieses Forschungsvorhabens ein Entscheidungsmodell entwickelt werden, welches KMU unterstützt, ihr unternehmensspezifisches Kommissioniersystem systematisch und gezielt an kurzfristige Nachfrageschwankungen und Marktveränderungen anzupassen. - Taktarbeit - Montage
Zur gezielten Prävention von arbeitsbedingten MSEs bzw. Repetitive Strain Injuries bedarf es innovativer Konzepte und Methoden, mit deren Hilfe eine sowohl wirtschaftliche als auch gesundheitsorientierte Taktarbeit sichergestellt wird. Dazu wird im vorliegenden Forschungsprojekt explorativ untersucht, ob die Integration spezifischer Belastungswechsel in die Taktarbeit zu einer Reduzierung der physischen Beanspruchung beiträgt und damit das Potential zur Prävention von Berufskrankheiten hat. Spezifische Belastungswechsel meinen in diesem Kontext, dass in einem Tätigkeitsabschnitt belastete Muskeln in dem nächsten Tätigkeitsabschnitt gezielt entlastet bzw. andersartig belastet werden. Im Rahmen der Untersuchung werden Kriterien für einen zielgerichteten Einsatz von solchen spezifischen Belastungswechseln entwickelt und in einen Methodenansatz überführt. Mit dessen Hilfe sollen Unternehmen befähigt werden, spezifische Belastungswechsel bei der Neugestaltung oder Anpassung von Taktarbeit zu berücksichtigen. - Variana
Multivariante Analyseverfahren zur Strategiewahl in der Nachserie - Entwicklung einer Systematik zur Strategiewahl durch multivariate Analyseverfahren in der Nachserienversorgung (NSV) von Elektronikbaugruppen - VariPro
Variabilitätsbasierte Maschinenbelegungsplanung für die kundenauftragsspezifische Produktion in KMU - VEIN
Vertrauen und Lernen im inkrementellen, fehlerinduzierten Innovationsprozess - Untersuchung von technischen und arbeitsorganisatorischen Erfolgsfaktoren einer kontinuierlichen Anpassung von Produktionsprozessen an sich stetig wandelnde Kundenanforderungen unter Lösung der in diesem Kontext auftretenden Probleme. - ViReBa
Im Rahmen des Förderprogramms KMU-innovativ: Ressourcen- und Energieeffizienz soll die Vibrationsreinigungstechnologie für ihren Einsatz in der industriellen Serienfertigung weiterentwickelt werden. Hierbei steht sowohl die serientaugliche Entwicklung der Reinigungstechnologie als auch deren Integration in schlanke Fertigungslinien à la Toyota im Mittelpunkt. - WaProTek
Ziel des Forschungsprojektes WaProTek (Wandlungsförderliche Prozessarchitekturen) ist es, Unternehmen zu befähigen, durch abgestimmte wandlungsförderliche Prozessarchitekturen ihre technischen, logistischen sowie organisatorischen und personellen Ressourcen akute Wandlungsbedarfe ihrer Produktionssysteme zu identifizieren, systematisch mit dem Leistungsangebot von Ausrüstern und Dienstleistern abzugleichen, wirtschaftliche Lösungen auszugestalten und diese qualifiziert zu betreiben.