
INDIVA
Individualisiert sozio-technische Arbeitsassistenz für die Produktion
(Projektlaufzeit: Januar 2014 bis Dezember 2016)
Problemstellung
Der demographische Wandel führt zu einer bedeutenden Veränderung der Altersstruktur in Deutschland. In den kommenden beiden Jahrzehnten wird der Anteil älterer Menschen an der erwerbstätigen Bevölkerung deutlich steigen. Im industriellen Umfeld sind Arbeitssysteme in den unterschiedlichen Bereichen so ausgelegt, dass Mitarbeiter gewisse physiologische Voraussetzungen mitbringen müssen, um der Tätigkeit nachgehen zu können.
Mitarbeiter, die z. B. altersbedingt eingeschränkt sind und die geforderten Eigenschaften nicht mehr im vollen Umfang leisten können, müssen dann den Einsatzbereich innerhalb des Unternehmens wechseln oder scheiden vorzeitig aus dem Unternehmen aus. Insbesondere diese Mitarbeiter verfügen jedoch aufgrund der oftmals jahrzehntelangen Erfahrung über vielfältige Fähigkeiten und ein fundiertes Wissen. Zudem bedrohen der stetig steigende Fachkräftemangel und der demographische Wandel die Verfügbarkeit von Arbeitskräften und somit die Effektivität deutscher Technologieführer unterschiedlicher Unternehmensgrößen. Hierdurch besteht die Anforderung, Arbeitssysteme für ältere, erfahrene Mitarbeiter so zu gestalten und anzupassen, dass diese bei der Arbeitsdurchführung individuell entsprechend ihrer Fähigkeiten unterstützt werden.
Zielsetzung
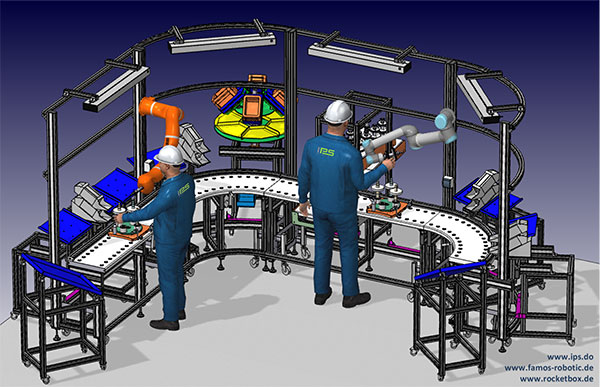
Ziel des Forschungsvorhabens INDIVA ist die Entwicklung und der Aufbau eines hochflexiblen, hybriden Montagesystems mit selektivem Automatisierungsgrad und einer fähigkeitsorientierten Aufgabenverteilung zwischen Mensch und Maschine.
Dabei liegt der Fokus des Forschungsvorhabens auf zwei Teilbereichen: Zum einen soll durch eine frühzeitige individualisierbare Simulation des Mensch-Maschine-Systems eine unter bewegungsökonomischen, ergonomischen und sicherheitstechnischen Aspekten optimierte Abstimmung der Mensch-Maschine-Interaktion erfolgen und so das zu entwickelnde Montagesystem zunächst virtuell erprobt werden. Zum anderen soll ein Demonstrator des entwickelten Montagesystems aufgebaut und anwendungsnah die Gebrauchstauglichkeit mit künftigen Nutzern evaluiert werden.
Bestandteil der Simulation ist ein Menschmodell, welches individuell auf unterschiedliche physische Fähigkeits- und Leistungsspektren angepasst werden kann. Dieses basiert auf individuellen, mittels eines Bewegungserfassungssystem aufgenommenen Bewegungsparametern, wie Beugungswinkel und Gelenkstellungen, und dient als Grundlage für die Offlineprogrammierung und -simulation des Arbeitsassistenzsystems. Auf diese Weise sollen künftig individuelle anthropometrische Parameter und Bewegungseinschränkungen, ggf. nach Vorgabe des Betriebsarztes, in dem zu entwickelnden Menschmodell abgebildet werden. Durch diese Individualisierung des Menschmodells wird es möglich sein, hybride Montagesysteme bereits während der Planung auf die jeweiligen Fähigkeiten des Mitarbeiters einzustellen und hinsichtlich der wirkenden physischen Belastungen zu bewerten und anzupassen.
Zur Unterstützung des Mitarbeiters in der Montage wird ein robotergestütztes Assistenzsystem entwickelt, dass eine direkte Kollaboration von Mensch und Roboter ermöglicht. Ein zentrales Ziel ist die Entwicklung eines durchgängigen Sicherheitskonzeptes zur Vermeidung von Gefährdungen für den Mitarbeiter, das ein direktes Zusammenarbeiten von Mensch und Technik ermöglicht. Um den Mitarbeiter in der Montage zu befähigen mit dem robotergestützten Assistenzsystem gemeinsam zu arbeiten und die gewünschte Unterstützung zu erzielen, wird für das System eine Mensch-Maschine-Schnittstelle entwickelt, die eine sichere und intuitive Bedienung sowie eine flexible Ankopplung der Roboterkinematik an das Arbeitssystem ermöglicht. Die entwickelten Technologien werden durch den Aufbau eines Demonstrators praxisnah umgesetzt und mit dessen Hilfe verifiziert.
Vorgehensweise
Im Forschungsvorhaben werden die drei folgenden unmittelbar verbundenen, aufeinan¬der aufbauenden und sich ergänzenden wissenschaftlichen und technischen Arbeitsziele verfolgt:
- Entwicklung einer Vorgehensweise zur aufwandsarmen, rechnergestützten Erfassung individueller anthropometrischer (Körpergröße) und biomechanischer Parameter (Bewegungseinschränkungen),
- Entwicklung einer Softwareumgebung zur virtuellen Gestaltung von bedarfsorientierten Arbeitsassistenzsystemen mittels individualisierbaren digitalen Menschmodellen,
- Entwicklung einer Hardwareumgebung zur bedarfsorientierten Arbeitsassistenz in der industriellen Montage zur Förderung gesunder und sicherer Arbeit sowie zur Sicherung der unternehmerischen Wettbewerbsfähigkeit.
Als Ergebnis ist eine Software- und Hardwareumgebung zu erwarten, die es Unternehmen ermög¬licht, individuellen Assistenzbedarf durch kollaborative Robotik zu identifizieren und entsprechende Systeme zu planen und umzusetzen. Die gesamte Umsetzungskette inklusive eines Demonstrators wird mit dem Projekt abgebildet und umgesetzt. Ziel ist des Weiteren, eine industrienahe Erstanwendung bei den beteiligten Partnern der Wirtschaft in der PKW-Komponenten- bzw. Pumpenmontage durchzuführen. Hierdurch wird sichergestellt, dass die Entwicklungen brachenübergreifend sowohl in Groß- wie auch in mittelständischen Unternehmen (z. B. KMUs) zum Einsatz kommen können.
Forschungs- und Entwicklungspartner
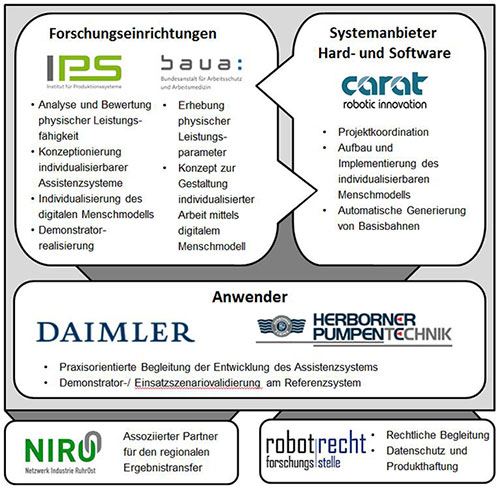
carat robotic innovation GmbH
Bundesanstalt für Arbeitsschutz und Arbeitsmedizin (BAuA)
Daimler AG
Herborner Pumpenfabrik J.H. Hoffmann GmbH & Co. KG
Förderhinweis
Dieses Forschungs- und Entwicklungsprojekt wird mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF) im Rahmen des BMBF-Programms "Technik stellt sich auf den Menschen ein - Innovative Schnittstellen zwischen Mensch und Technik" gefördert und vom Projektträger VDIVDE-IT betreut.