
SysPOT
System zur adaptiven photonischen Oberflächentestung mit lernfähiger Bildauswertung in Kombination mit einem Reinigungssystem
Problemstellung und Motivation
Einhergehend mit der Entwicklung immer kleinerer und leistungsfähigerer Baugruppen und Komponenten im Maschinenbau, der Automobil- und der Elektronikindustrie hat sich das Qualitätsmerkmal „Technische Sauberkeit“ (TecSa) entwickelt. Es beschreibt im Wesentlichen die Abwesenheit unerwünschter Materie innerhalb der industriellen Fertigung und Montage, welche negative Folgen für die Leistungsfähigkeit und Zuverlässigkeit der Komponenten und das Gesamtsystem haben. Zudem können Partikel im Prozess der Fehlerüberprüfung von Oberflächen zu unerwünschten Pseudofehlern führen, welche zu einer erhöhten Ausschuss- bzw. Nacharbeitsrate führen können.
Derzeit wird zumeist auf eine Analyse der Sauberkeit nach VDA 19.1 zurückgegriffen, welche jedoch keine Direktinspektion der Bauteile mit einer gleichzeitigen Interpretation der Ergebnisse zulässt. Durch die zeitliche Latenz ist es zudem nicht möglich, zwischen den Messungen und den Ergebnissen eine Adaption von Prozessen vorzunehmen. Dabei sind besonders Reinigungsprozesse ausgeschlossen.
Zielsetzung
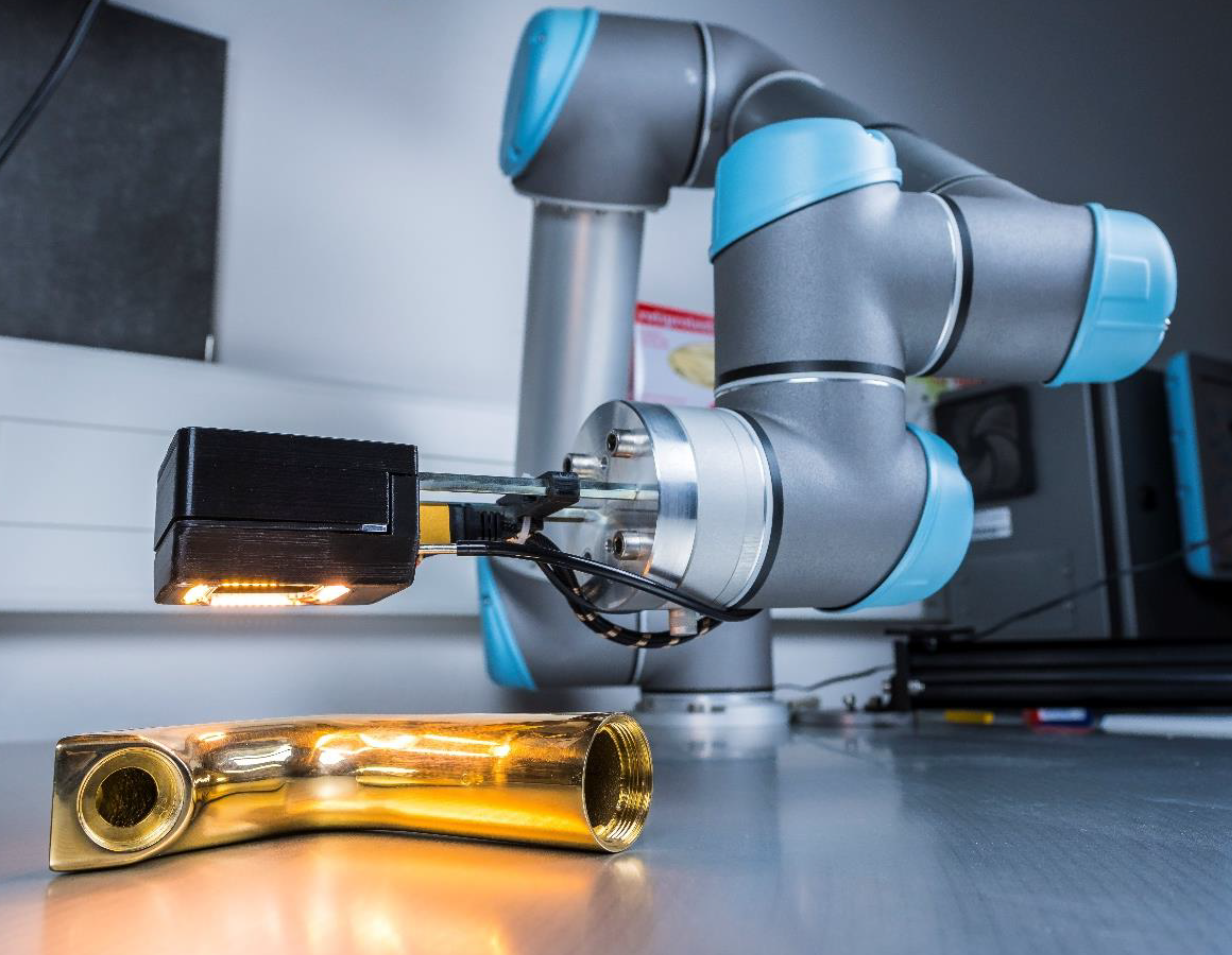
Die angestrebte Innovation basiert auf der Erforschung einer KI-basierten Steuerungs- bzw. Reglungslogik, durch die partikuläre Verschmutzungen und Kratzer analysiert werden können. Ein Sensor soll in diesem Vorhaben auf verschiedenen Oberflächen und Geometrien automatisiert adaptiert werden und die sich ergebenden Ergebnisse des Sensors in Form von Bildern klassifiziert werden. Ziel ist es ein Assistenzsystem zu entwickeln, welches Nutzern in Echtzeit Informationen über die Eigenschaften von Partikeln und ihre Entstehung im Produktionsprozess liefert. Dadurch wird es Anwendern ermöglicht, Verbesserungen in der Wertschöpfungskette einzuleiten. Kombiniert werden soll dies mit einer Selbstkonfiguration der Reinigungsanlage. Diese soll zum einen dem gesellschaftlichen und ökologischen Anspruch gerecht werden, bedarfsgerechte Reinigungen mit minimalem Einsatz von Energie und Chemie zu ermöglichen und zum anderen den Aufwand für die Konfiguration von Reinigungsprozessen durch Experten zu verringern. |
Vorgehensweise und Arbeitsteilung
Der Arbeitsplan des Projektes gliedert sich in vier Arbeitspakete. Die inhaltliche Ausarbeitung der Forschungsfrage in Bezug auf den optischen Sensor erfolgt dabei durch die KI-basierte Regelung des optischen Sensors, die Klassifikation der erzeugten Partikelbilder und die Reglung des bedarfsgerechten Reinigungsprozesses. Zudem soll eine abschließende Validierung der Projektergebnisse und der Transfer in die Praxis erfolgen
Anfänglich werden die Anforderungen an die Gesamtsysteme erhoben und definiert. Unter der Hinzunahme von Algorithmen, welche die automatisierte Bildaufnahme und die Selbstkonfiguration des Sensors unterstützen, erfolgt im Anschluss die Forschungsarbeit, welche die Segmentierung der Partikel auf verschiedenen Oberflächen betrifft. Zusätzlich umfasst die Einarbeitung und Verifikation von verschiedenen Klassifikationsmodellen unter Berücksichtigung der erforderlichen Datenbasis und der Annotation der Bilder, welche die Interpretierbarkeit der Sensorergebnisse ermöglichen. Damit die Reinigungsparameter so konfiguriert werden können, dass die gewünschte Sauberkeit zu minimalen Kosten erreicht werden kann, werden Ansätze des verstärkenden Lernens erforscht. Dadurch wird auf die Einbindungspotentiale des Sensors in Reinigungsanlagen hinsichtlich der Selbstkonfiguration des Gesamtsystems geachtet. Abschließend werden die Forschungsergebnisse hinsichtlich ihrer Anwendung getestet. Dabei werden Schnittstellen für die industrielle Integration und die wirtschaftlichen Potenziale untersucht, welche sich durch die Anwendung der Ergebnisse erzielen lassen.
Forschungs-, Entwicklungs- und Anwendungspartner
Das Forschungsprojekt SysPOT wird von einem Team bestehend aus 14 Konsortialpartnern (Forschungs-, Entwicklungs- und Anwendungspartner) erarbeitet. PI Innovation GmbH übernimmt die Konsortialführung, während das Institut für Produktionssysteme seine Kenntnisse zum Einsatz von Deep Learning im Bereich der technischen Sauberkeitsanalyse einbringt und dabei von IconPro unterstützt wird.
Inline-SPOT-Sensor: PI Innovation, Fraunhofer IPM, Hexagon
Bedarfsorientierte Reinigung: Höckh, Gläser, LPW
KI-basierte Steuerung: IPS, IconPro
Assoziierte Partner: Audi AG, Hansgrohe, sprintBOX, Walter AG, ZF, MTU Aero Engines
Förderhinweis
Das Vorhaben (Förderkennzeichen: 100483490) wird im Rahmen des Förderbereichs „Computer-Aided Photonics“ vom Bundesministerium für Bildung und Forschung (BMBF) gefördert und vom Projektträger VDI Technologiezentrum betreut.