
HaptoBot
Robotergestützte End-of-Line Prüfung haptischer Charakteristika zur Qualitätskontrolle
Problemstellung
Die Mensch-Maschine-Schnittstellen in unserer Umwelt werden zunehmend nicht nur auf einwandfreie Funktionalität getrimmt, sondern sollen einen dem Gesamtprodukt gerechten Qualitätseindruck vermitteln. Man spricht hierbei von „Look and Feel“. Im Rahmen der Qualitätskontrolle ist es deshalb von besonderer Bedeutung, die gewünschten Haptik-Charakteristika objektiv zu erfassen und zu bewerten. Ein Robotersystem in Kombination mit hochsensibler Sensorik bietet die erforderliche Flexibilität, Präzision und Reproduzierbarkeit, um komplexe Bedienhandlungen des Menschen abzubilden und messtechnisch zu erfassen.
Zielsetzung
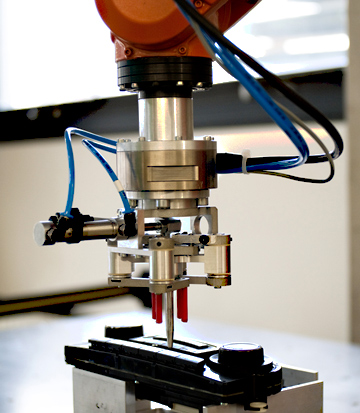
Im Rahmen des Projektes HaptoBot soll ein Standard-Industrieroboter mit einer echtzeitfähigen Kraftregelung und einem hochauflösenden Kraft-Momenten-Sensor ausgestattet werden. Der Roboter dient zur Ausführung der Prüfbewegungen am Schaltelement und gleichzeitig zur Erfassung der Bedienkräfte. Darüber hinaus sollen die gemessenen Kraft- und Drehmomentwerte zur aktiven Korrektur von Position und Orientierung der Messeinrichtung genutzt werden. Auf diese Weise können Störeinflüsse durch Positionierungsfehler oder Bauteiltoleranzen vermindert werden. Das Gesamtziel der Robotik ist die Aufzeichnung von fehlerbereinigten Haptik-Charakteristika mit hoher Geschwindigkeit und minimalem Teaching-Aufwand.
Vorgehensweise
Hierbei sollen zunächst die erforderlichen Bedienhandlungen des Menschen mittels Industrieroboter nachgebildet werden. Dazu ist die Entwicklung einer flexiblen Betätigungskomponente notwendig. Die Definition der Prüfbewegungen soll durch Kraft- und Drehmomentschwellwerte geschehen, um den Teaching-Aufwand gering zu halten und Unterschiede zwischen den einzelnen Messobjekten auszugleichen. Während der Prüfbewegung sollen automatisch Ausgleichsbewegungen des Roboters eventuelle Störungen in den Messwerten, beispielsweise durch positionsbedingte Querkräfte, vermindern. Eine besondere Herausforderung stellen dabei die sehr kleinen Betätigungskräfte dar, welche hohe Anforderungen an das Messequipment und die Führung durch den Roboter stellen. Eine weitere Komponente des Teilprojekts sieht vor, die Programmierung der Prüfstation und der Testabläufe in einer anwendungsnahen Beschreibung zu ermöglichen, sodass die Bedienung auch für Anwender ohne spezielle Robotik-Kenntnisse keine Schwierigkeit darstellt.
Förderhinweis
Das ZIM-Vorhaben HaptoBot wird über die AiF im Rahmen des Programms „Zentrales Innovationsprogramm Mittelstand“ vom Bundesministerium für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages gefördert.