![[Translate to English:]](/storages/zentraler_bilderpool/_processed_/2/6/csm_Altes_Maschinenbau-Gebaeude_60ecc93ec7.jpg "[Translate to English:]")
MANUSERV
From manual process to industrial service robot
(Project duration January 2014 to December 2016; project processing is carried out by RIF e.V., Department of Work and Production Systems, Production Automation Division)
Problem
The increased socio-technical interaction of all actors and resources involved in production is summarised under the term "Industry 4.0". This includes the networking of autonomous, situationally self-controlling and self-configuring, knowledge-based, sensor-supported and spatially distributed production resources, including the associated planning and control systems. One consequence of this development is the emergence of production systems within which previously purely manual processes are increasingly carried out in cooperation between man and machine. In addition to the aspect of safety, the organisation and design of work is an essential field of action.
Central development steps in this regard concern all areas of application of industrial automation and, in particular, service and assistance systems. In particular, the field of service robotics, which is defined as the ability of technical systems to perform individual tasks or services independently or interacting with humans, is currently characterised by great ambitions and progress in the field of research. At the same time, however, service robotics applications are hardly used in industrial practice. Obstacles to a more efficient use of research results are the high effort required for the selection and implementation of suitable service robotics systems, the high level of uncertainty regarding performance and profitability, and the fact that currently only a few special developments exist that are transferable to a limited extent.
Objective
In this context, the MANUSERV research project is intended to bring about stronger networking between manufacturers and users of industrial service robotics applications so that the product approaches already developed in the field of service robotics can be transferred to a broader field of application. Thus, the development of a planning and support tool for the realisation of service robotics applications in the industrial environment is an essential goal of the research project. For this purpose, a standardised, abstracted and sufficiently detailed process description language for the systematic analysis of manual work processes must first be selected and expanded to include automation-related influencing variables. This forms the basis for the subsequent development of a planning core for automatic action planning for service robot systems. The planning kernel to be developed serves to carry out the technical and economic evaluation of the respective manual process with regard to its automation capability. The result is to support the user in selecting a suitable service robotics system under the specified boundary conditions of the respective application scenario.
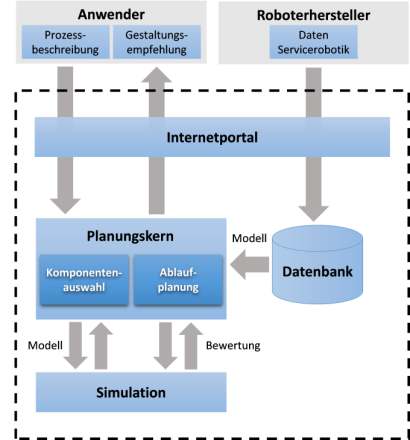
In addition, a concrete movement plan is generated for the automation solution found, which consists of so-called elementary actions. In order to make a meaningful and secure decision about the suitability of an automation solution, various information, such as the assignment of elementary functions per robot type, the permissible parameter range, but also the size and shape of the workspace, are of particular importance. To bring this information together, the Internet portal "Service Robotics" is being set up as part of the research project. In the form of internet-based catalogues, which are set up, updated and maintained by the providers of technical automation solutions, users can be provided with differentiated technical solutions for carrying out their previously purely manual processes. Automation and service robotics solutions are thus centrally retrievable, made available to the largest possible group of users and enable communication between manufacturers and users of industrial service robotics. In addition to the possibility of identifying suitable industrial service robotics solutions and their use for previously defined elementary functions, the virtual verification and refinement of the selected configuration takes place in a generated simulation environment (eRobotics system).
By means of the presented planning core and eRobotics system within the internet portal, the user is provided with planning and decision support from the planning stage to the realisation of the hybrid work system. In this way, the complexity of the planning task is reduced and made manageable, especially for small and medium-sized enterprises. The work described within the framework of the research project enables flexible cooperation between humans and robots in various use cases. The result is the efficient combination of repetition accuracy as well as performance of automated systems and the flexibility and fast adaptability of humans.
Procedure
The research project is designed to run for 3 years. The desired research results will be developed in the form of six work packages, which are distributed over two successive project phases. In the first phase, the manual process will be analysed and checked with regard to its automatability and the subsequent system selection. The sub-steps of this phase are, in addition to the recording and preparation of the manual work process, the automatic action planning on the basis of defined, concrete movement sequence plans as well as the determination of the degree of automation of the work system. Finally, a suitable service robot solution is selected on the basis of previously defined criteria, including a possible sequence plan. The main component of the subsequent second project phase is the virtual planning and implementation of the automation solution found. Differentiated application scenarios are developed in cooperation with the consortium partners. The second project phase includes both the verification of the generated schedule by means of simulation and the detailed evaluation of the planned solution on the basis of costs, execution time and safety, among other things. For validation, a software and hardware demonstrator is developed, adapted and tested. Finally, the technical realisation of the selected solution takes place.
The composition of the project consortium allows various challenges and problems to be addressed. The tasks are distributed taking into account the respective core competences of the consortium partners. At the software level, several application scenarios are demonstrated and the functionality of the system selection and action planning is tested. The hardware realisation of the virtually tested processes is then initially carried out via a basic setup at the Institute for Research and Transfer and beyond that at the individual application partners.

Research- and Development Partner
- RIF e.V. - Institute for Research and Transfer
- Research Area "Industrial Engineering", Prof. Dr.-Ing. Deuse
- Research Area "Production Automation", Prof. Dr.-Ing. Kuhlenkötter
- Research Area "Robotics", Prof. Dr.-Ing. J. Rossmann
- GEA Farm Technologies GmbH
- ICARUS Consulting GmbH
- KHS Corpoplast GmbH
- Albrecht Jung GmbH & Co. KG
Funding Reference
The project is funded within the framework of the technology programme "Autonomics for Industry 4.0" by the Federal Ministry for Economic Affairs and Energy based on a resolution of the German Bundestag (funding code 01MA13011A) and is supervised by the Multimedia Project Management Agency at the German Aerospace Centre.