![[Translate to English:]](/storages/zentraler_bilderpool/_processed_/2/6/csm_Altes_Maschinenbau-Gebaeude_60ecc93ec7.jpg "[Translate to English:]")
INNO-GRIP
Smart Small-Part Gripper utilizing Photogrammetry and AI Models in Automated Assembly (Project processing ist carried out by RIF e.V., Production Systems Department)

Problem
Despite the high heterogeneity of possible small parts, humans are able to handle these objects using two or three fingers. Robots, on the other hand, tend to be less flexible and require retooling. Especially in small and medium production batch sizes, there is a strong demand, due to high investment costs and significant adaptation effort in handling technology, for flexible, quickly reconfigurable, and programmable automation solutions for small parts handling in manufacturing. At the same time, recent developments in robotics and artificial intelligence are opening up new potential for small parts handling.
Objective
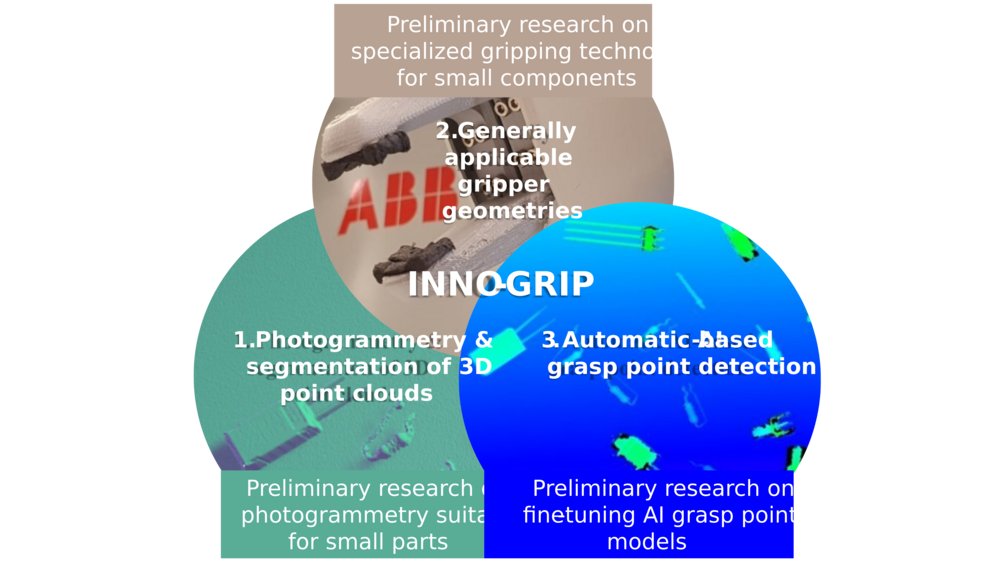
The goal of the INNO-GRIP project is the development of an adaptable gripping system for small parts using optical 3D measurement technology. To achieve this, the environment is captured using photogrammetry and segmentation of 3D point clouds. In parallel, an adaptable gripper is developed. Finally, automatic grasp point determination is carried out.
Approach
Zu Beginn des Projekts werden Photogrammetriesysteme aufgebaut und verglichen. Die entstehenden Punktewolken werden segmentiert. Anschließend werden Kleinteile auf ihre Eigenschaften systematisch analysiert und abstrahiert, so dass die anschließenden designten Greiferformen zu den Kleinteilen passen. Die entwickelten Greifer werden auf Flexibilität und Robustheit getestet. Die Greifpunkterkennungsalgorithmen werden auf den Kleinteilen verglichen und nachtrainiert. Abschließend werden die entwickelten Teilergebnisse in einem Soft- und Hardware-Demonstrator zusammengefügt und das integrierte System experimentell getestet.
Research, Development and Application Partners

Funding Reference
The INNO-SCREW project is funded by EURONORM GmbH as part of the “INNO-KOM Innovation Competence” funding program of the Federal Ministry for Economic Affairs and Energy (BMWE).