
ROBOTOP
Modulare, offene und internetbasierte Plattform für Roboter-Anwendungen in Industrie und Service (ROBOTOP)
(Projektlaufzeit: Juni 2017 bis Mai 2020)
Problemstellung und Motivation
Industrielle Roboter-Anwendungen müssen erhebliche technische Anforderungen erfüllen, um eine hohe Verfügbarkeit, Qualität und Sicherheit zu gewährleisten. Hierdurch entstehen in vielen Fällen hochkomplexe Applikationen. Zur erfolgreichen Planung dieser Robotersysteme sind bisher ein entsprechend hohes Fachwissen, ein großer Erfahrungsschatz sowie umfangreiche Kenntnisse der Normungslage erforderlich. Besonders für kleine und mittlere Unternehmen (KMU) stellt dies eine Eintrittsbarriere zur Nutzung industrieller (Service-)Robotik-Anwendungen dar. Ausgehend von dem erwarteten Engineering-Aufwand sowie den hohen Kosten für die technischen Komponenten und für die Unterstützungsleistungen von Seiten der Systemintegratoren können zahlreiche Roboterlösungen derzeit nicht oder nur sehr eingeschränkt umgesetzt werden.
Leistungsfähige Webplattformen, die den vollständigen Engineering-Prozess von der initialen Grobplanung und Komponentenauswahl über die Unterstützung bei der Integration bis hin zur virtuellen Inbetriebnahme abbilden, sind daher eine zentrale Schlüsseltechnologie. Diese können letztlich den Weg in Richtung einer signifikanten Steigerung des Umsetzungsgrads innovativer Roboter-Anwendungen ebnen.
Zielsetzung
Das Ziel des Projektvorhabens ROBOTOP ist die Erarbeitung einer modularen, offenen Internetplattform für Industrie- und Serviceroboter. Diese soll ein Fundament zur Erschließung des Massenmarktes für Roboter in Fertigungs-, Logistik- und Serviceanwendungen darstellen. Die Plattform optimiert die Planungsprozesse sowohl anbieter- als auch kundenseitig und verknüpft beide Gruppen somit direkt miteinander. Dabei bietet die ROBOTOP-Plattform weitreichende Assistenzfunktionalitäten in allen Phasen der Automatisierungsplanung (s. Abb. 1).
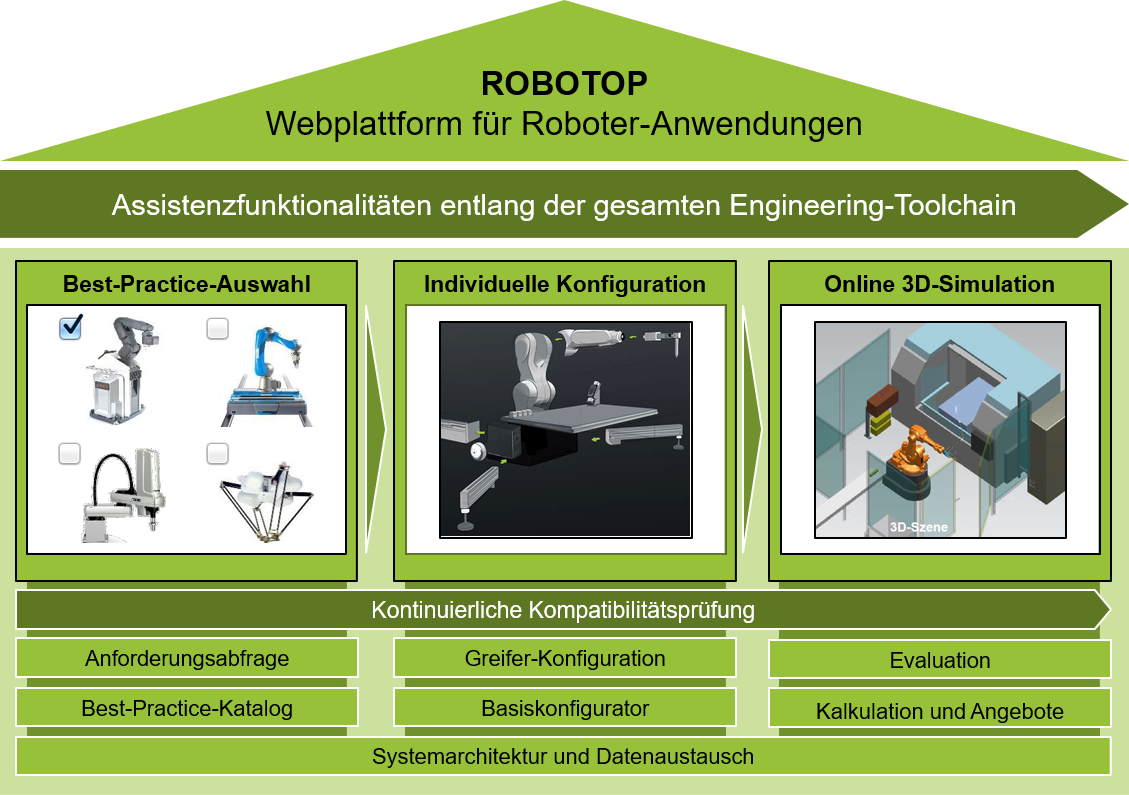
Im Zuge einer initialen Best-Practice-Auswahl besteht für potentielle Endanwender zunächst die Möglichkeit, ihre individuellen Anwendungsszenarien (z. B. manuelle Arbeitsplätze) anhand eines strukturierten und benutzerfreundlich ausgestalteten Fragebogens zu beschreiben. Auf Basis einer laufend erweiterten Zusammenstellung industriell umgesetzter Best Practices werden hierfür in einem automatisierten Auswahlprozess geeignete Umsetzungsbeispiele abgeleitet. Diese dienen als erster Konzeptvorschlag für den betrieblichen Endanwender und zudem als Grundlage für den hieran anknüpfenden, individuellen Konfigurationsprozess. In diesem Zug können geeignete Robotersysteme, Peripheriekomponenten und Greifsysteme frei miteinander kombiniert werden, wobei die Kompatibilität der Einzelkomponenten zu jeder Zeit gewährleistet wird. Zur Steigerung der Benutzerfreundlichkeit können die zusammengestellten Systeme unmittelbar in eine webbasierte 3D-Simulation überführt werden. Gleichzeitig können Anwender dadurch eine erste Abschätzung der technischen Umsetzbarkeit der zusammengestellten Lösung für ihre spezifischen Anwendungsszenarien vornehmen. In Abhängigkeit dessen besteht im Anschluss die Möglichkeit, vorgelagerte Prozessschritte zur Verbesserung der Planungsergebnisse erneut zu durchlaufen oder alternativ zwecks einer ersten Grobkalkulation und Angebotsstellung direkt Kontakt zu potentiellen Dienstleistern aufzunehmen.
Vorgehensweise und Arbeitsteilung
Das Projektkonsortium ist interdisziplinär aufgestellt und setzt sich aus Herstellern von Automatisierungskomponenten und unterstützenden Softwareprodukten, Integratoren und Endanwendern sowie universitären Forschungseinrichtungen zusammen.
Das IPS koordiniert dabei das Teilvorhaben PlaNET mit dem Schwerpunkt der Entwicklung einer Best-Practice-Auswahl. Eingangs erarbeitet das IPS hierfür einen einheitlichen Fragenkatalog zur Identifizierung der automatisierungsrelevanten Eigenschaften von Arbeitssystemen, der für die Befragung von Anwendern genutzt wird. Mittels umfangreicher Recherchearbeiten und praktischen Erhebungen bei industriellen Endanwendern wird ferner eine Bibliothek erfolgreich umgesetzter Best Practices angelegt. Mit Hilfe dieser formellen Datenbasis für Robotik-Applikationen wird anschließend eine Methode zur Bewertung des Automatisierungspotentials und Empfehlung von Best-Practice-Lösungen konzipiert. Im Zuge des ganzheitlichen Austauschs erarbeitet das IPS in Kooperation mit den Projektpartnern aus Industrie und Forschung ferner Anforderungen für die Erstellung des Basiskonfigurators und der hiermit verbundenen Kompatibilitätsprüfung und begleitet in der finalen Projektphase die abschließende Evaluation und Optimierung des Gesamtsystems.
Forschungseinrichtungen
, Friedrich-Alexander-Universität Erlangen-Nürnberg")
Softwarehäuser
Anwendungspartner

Förderhinweis
Dieses Projekt wird mit Mitteln des Bundesministeriums für Wirtschaft und Energie (BMWi) im Rahmen des Programms „PAiCE - Digitale Technologien für die Wirtschaft“ (Förderkennzeichen 01MA17009H) gefördert und vom Projektträger DLR betreut.